
Last time, we looked at the scalar, or dot, product of vectors, focusing on proving the equivalence of two ways to define it. This time, we’ll look at the vector, or cross, product in the same way. The distinction between dot and cross product reflects the symbol used, u · v vs. u × v, which is a creative use of the two different symbols that evolved for multiplication of numbers. The real distinction, though, is between the product being a scalar (number) and a vector.
What is the cross product?
As we saw last time, the dot product is hard to explain in simple geometric terms, so that it seems unlikely that anyone would invent it in that form. Rather, it is a simple way to combine two vectors algebraically, that has properties suitable for multiplication, and that happens to incorporate the angle between the two vectors, specifically its cosine, making it very useful. The same is true of the cross product, which is complicated to describe geometrically, but is (in some sense) very neat algebraically, and turns out to involve the sine of the angle between them.
I’ll start, as I did last time, with a question about the essential meaning of the operation; this time I have to use a question from 2016 that was not published in the Ask Dr. Math archive. It starts with the geometric description, with a mention of the algebraic form using determinants, which we’ll talk more about below.
What does the cross product of two vectors actually represent? Ex. a X b = |a||b|sin(angle between the vectors).u, where u is a unit vector in the direction of a X b My Physics professor once stated that there is a physical definition of cross product of vectors. Though he didn't elaborate, I am still thinking what it might be. I tried breaking the vectors and using the determinant technique to evaluate the result. I carefully examined the determinant and the definition to understand. Upon finding that the determinant represents a parallelogram's area, I concluded that it might represent vector area of the parallelogram. However, I still don't understand what the physical meaning is.
Here is an example showing a cross product:
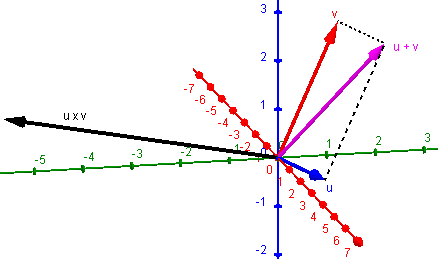
Vectors u and v form a parallelogram with diagonal u + v; the cross product u×v is perpendicular to that plane, and its magnitude is \(|\mathbf{u}| |\mathbf{v}|\sin(\theta)\), which is the area of that parallelogram.
I replied, first giving references to the three pages we’ll be looking at below and next time, then continuing:
These give successively more detailed answers to what the cross product is. I think your description as "vector area of a parallelogram" (or "directed area") is good. I don't know just what your professor might have had in mind as a "physical definition"; it is *defined* mathematically, not by physics, but it can be *applied* in physics in various ways that justify its use. It appears in several rather distinct fields of physics, so no one of those can be called the meaning of the cross product in general. Maybe you should ask your professor!
Avinash’s term “vector area”, which I suggested calling a “directed area”, refers to the fact that the magnitude of the cross product is the area of the parallelogram defined by the vectors, while its direction is perpendicular to the plane of the two vectors.
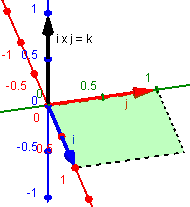
For a particularly simple example, consider the cross product of the unit vectors i and j, which is a vector perpendicular to both, with magnitude 1, the area of a 1 by 1 square:
Avinash replied,
When replying to my question, you mentioned "directed area". I am a bit confused, as to how area being a scalar can be called a vector. I know, I talked about vector area and so you might assume that I know about it.But the truth is that I had to accept the fact as is. I hope that you can give me a convincing explanation of vector area.
I answered,
Well, that's why we don't just call it area! Area itself is a scalar; but we can associate it with a direction, and it happens that the cross product naturally combines them. I think you made up the term "vector area"; when we talk about that or "directed area", we simply mean attaching a direction to an area. That is mentioned here: https://en.wikipedia.org/wiki/Cross_product In mathematics and vector calculus, the *cross product* or *vector product* (occasionally *directed area product* to emphasize the geometric significance) is a binary operation on two vectors in three-dimensional space (R^3) and is denoted by the symbol x. This directed area is just the area times a unit vector perpendicular to the plane (which defines the direction of the plane).
The term “vector area” is in fact used, though not usually in this context.
We can also talk about "signed area", which is closely related; this commonly arises in connection with a formula for the area of the region enclosed by a polygon, which gives a positive area if you go around counterclockwise, but a negative area in the other direction. This formula is closely related to the cross product. Here are two discussions of this: Quadrilateral Area http://mathforum.org/library/drmath/view/60583.html Geometric Proof of Area of Triangle Formula http://mathforum.org/library/drmath/view/72141.html
This last link mentions the cross product, and provides an introductory proof of what we’ll be seeing later; I previously discussed it in Polygon Coordinates and Areas.
Avinash pursued the question:
Thank you for your response. You helped me a lot, but could you please explain why do we associate direction with an area? It is kind of hard to come up with an idea of combining area with direction. I mean, how could someone think of using directions in area, a scalar quantity? Is it because of applications in finding flux or something alike?
This is the core of the question: Why do all this at all?
I said,
The first reason is probably that when we look for a way to make a vector perpendicular to the plane of two given vectors, it just happens that the magnitude of the cross product, which does that job, is equal to the area. So we accept that as a gift! It's not that we were seeking that goal; it was just handed to us as a nice result. It also turns out the this idea is useful, as you mention, for concepts like flux. Someone might have thought of that first; I don't know. But however it came about, it's a good idea. Everything works together very neatly.
As we pursue a proof below, we’ll see that what I said is exactly right. Avinash concluded:
Thank you, thank you, thank you, thanks a million for answering all my questions without grumbling. If I had asked all these questions to my math professor, he would have regarded it as 'stupid' and 'irrelevant'. Glad that the members of Dr. Math are always ready to help.
To which I replied,
You're welcome. I actually like the odd questions that don't really have answers, but that make you look deeper into things! I don't get those enough in my classes.
Now let’s look at the first of the archived answers I referred Avinash to.
How (and why) to invent two products
This question is from 2012:
Crossed up by Scalars and Vectors I have never really understood why dot products and cross products have been defined the way they are. Why is the result of a dot product a scalar, and that of a vector product a vector? I have consulted many books, and I have searched the net, but nobody seems to give any plausible explanation for this.
Doctor Jerry replied, starting with the dot product, much as we saw last time:
Hello Karthik,
Thanks for writing to Dr. Math.
Given the idea of a vector, it is natural to look for a way to calculate the angle t between vectors (a1, a2, a3) and (b1, b2, b3). Letting ||a|| be the length of the vector a, if you apply the Law of Cosines to the triangle with sides a, b, and a - b, you will see
(a1 - b1)^2 + (a2 - b2)^2 + (a3 - b3)^2 =
a1^2 + a2^2 + a3^2 + b1^2 + b2^2 + b3^2 - 2||a||*||b||* cos[t]
Simplify and you will find this, where "x y" means "x times y":
a1 b1 + a2 b2 + a3 b3 = ||a||*||b||*cos[t]
This makes it clear that the left side is a useful combination of a and b.
This is about as concise an answer as one could give. We can imagine starting with the Law of Cosines in the hope of finding the angle. Having found this simple formula, we just define the left-hand side as $$\mathbf{a}\cdot\mathbf{b} = a_1 b_1 + a_2 b_2 + a_3 b_3$$ and we have proved that $$\mathbf{a}\cdot\mathbf{b} = ||\mathbf{a}|| ||\mathbf{b}||\cos(\theta)$$
(By the way, notice that for ease of typing, we have often used \(|\mathbf{u}|\) for magnitude, i.e. length, but the proper notation is \(||\mathbf{u}||\).)
Now we can try something similar to invent the cross product:
For the cross product, if you have vectors a = (a1, a2, a3) and b = (b1, b2, b3), it seems clear that a vector that is perpendicular to both of a and b would be useful. So, we seek a vector (c1, c2, c3) such that a.c = 0 b.c = 0 If you solve this system of two equations for c1 and c2, you will find c1 = (a3 b2 - a2 b3)/(a2 b1 - a1 b2) * c3 c2 = (-a3 b1 + a1 b3)/(a2 b1 - a1 b2) * c3 If you choose c3 as a2 b1 - a1 b2, this will give a solution and clean up the mess a bit.
Having defined the dot product, we use it to find whether two vectors are perpendicular. The resulting system of equations looks like this: $$\left\{\begin{matrix}a_1c_1+a_2c_2+a_3c_3=0\\ b_1c_1+b_2c_2+b_3c_3=0\end{matrix}\right.$$ There are only two equations for three variables, so the solution is not unique; as it turns out, it only determines the proportions (i.e., the direction of the resulting vector).
He treats \(c_3\) as a constant in order to solve (a quick way would be to use Cramer’s Rule), observing that the solution really expresses \(c_1\) and \(c_2\) as multiples of \(c_3\), so that taking \(c_3\) as the denominator of both fractions gives a convenient result: $$\mathbf{a}\times\mathbf{b} = \mathbf{c} = (a_3b_2-a_2b_3, a_1b_3-a_3b_1, a_2b_1-a_1b_2)$$ This has a nice pattern to it, which can be restated in various ways, including using determinants, which are just a shorthand way to write exactly these kinds of expressions.
Notice that this approach, as I suggested earlier, focuses on making a perpendicular vector; we don’t even know yet the significance of its magnitude. We’ll get to that in a moment.
Note, again, that the original goal was not to find a scalar product and a vector product! It was to find an angle, which led to a scalar, and a perpendicular vector. When these were discovered, it was natural to name them the scalar product and the vector product, and eventually to use the dot and cross multiplication symbols to distinguish them. The actual development of these ideas started from a different perspective, as vectors themselves were only gradually being developed; the dot and cross representations came around 1880, after 40 years or so of development.
Can we prove that |u×v| = |u||v|sin θ ?
We’ve derived the definition of the cross product as a vector perpendicular to the given vectors, but its magnitude was just whatever arose from the easiest choice. Can we prove that the magnitude is what we say it is, the area of the parallelogram? I don’t find that in any published answers, so I’ll use two that were not archived. First, consider this one from 2003:
How can one prove that for 2 vectors a and b that the vector product (a cross b)= mod(a).mod(b).sin(theta).n Where does the sine come in to the equation - is it through the determinant definition of the cross product?
Doctor Fenton answered:
Hi Peter,
I assume that n is a unit vector in the direction of (a x b), so your question is essentially why
|a x b| = |a||b|sin(θ) ,
where θ is the angle between a and b. Here, |a| is the modulus of a vector a.
This quantity is also the area of the parallelogram with sides a and b.
- - - - -
a /:
/ :h /
/ :
/θ : /
----------
b
The altitude h is |a|sin(θ), so the area is |a||b|sin(θ).
The fact that the magnitude is the area is not part of the proof, but a useful fact. Now, where can we can get a sine from? You might think of the Law of Sines, as we used the Law of Cosines for the dot product, but I don’t think anything would come of that. But since we already know that the dot product is related to the cosine, we might try to use that:
sin^2(θ) = 1 - cos^2(θ)
[ a.b ]2
= 1 - [ ------ ]
[ |a||b| ]
[|a|^2|b|^2 - (a.b)^2 ]
= -----------------------
|a|^2 |b|^2
so we want
[|a||b|sin(θ)]^2 = |a|^2|b|^2 - (a.b)^2 .
Just expand the right side, simplify, and you will have |a x b|^2 .
We now have to show that the right side agrees with our algebraic definition of the cross product. Doctor Fenton left that to Peter; let’s give it a try:
$$|a|^2|b|^2 – (a\cdot b)^2 \\= (a_1^2+a_2^2+a_3^2)(b_1^2+b_2^2+b_3^2) – (a_1b_1+a_2b_2+a_3b_3)^2\\ =(a_1^2b_1^2+a_1^2b_2^2+a_1^2b_3^2+a_2^2b_1^2+a_2^2b_2^2+a_2^2b_3^2+a_3^2b_1^2+a_3^2b_2^2+a_3^2b_3^2) \\- (a_1^2b_1^2+a_2^2b_2^2+a_3^2b_3^2+2a_1a_2b_1b_2+2a_2a_3b_2b_3+2a_1a_3b_1b_3)\\ =a_1^2b_1^2+a_1^2b_2^2+a_1^2b_3^2+a_2^2b_1^2+a_2^2b_2^2+a_2^2b_3^2+a_3^2b_1^2+a_3^2b_2^2+a_3^2b_3^2\\- a_1^2b_1^2-a_2^2b_2^2-a_3^2b_3^2-2a_1a_2b_1b_2-2a_2a_3b_2b_3-2a_1a_3b_1b_3\\ =a_1^2b_2^2+a_1^2b_3^2+a_2^2b_1^2+a_2^2b_3^2+a_3^2b_1^2+a_3^2b_2^2-2a_1a_2b_1b_2-2a_2a_3b_2b_3-2a_1a_3b_1b_3$$
But what is \(|a \times b|^2\)?
$$|a \times b|^2 \\= |(a_3b_2-a_2b_3, a_1b_3-a_3b_1, a_2b_1-a_1b_2)|^2 \\= (a_3b_2-a_2b_3)^2+(a_1b_3-a_3b_1)^2+(a_2b_1-a_1b_2)^2 \\= (a_3^2b_2^2-2a_2a_3b_2b_3+a_2^2b_3^2)+(a_1^2b_3^2-2a_1a_3b_1b_3+a_3^2b_1^2)+(a_2^2b_1^2-2a_1a_2b_1b_2+a_1^2b_2^2) \\= a_1^2b_2^2+a_1^2b_3^2+a_2^2b_1^2+a_2^2b_3^2+a_3^2b_1^2+a_3^2b_2^2-2a_1a_2b_1b_2-2a_2a_3b_2b_3-2a_1a_3b_1b_3$$
They are equal!
Using vector algebra
The hard part there was the algebra at the end. With more expansive understanding of the algebra of vectors (provable from the purely algebraic definition we are using), it is possible to make the work look a little neater, at least. Here is an unarchived question from 2006; I’m going to abridge this discussion heavily, removing a number of wrong paths along the way:
Prove that ||A x B|| = ||A||.||B||.sin θ using the properties of cross product. Properties are: 1. A x B = -B x A 2. A x (B + C) = A x B + A x C 3. A x A = 0 4. r(A x B) = r(A) x B = A x (rB) 5. A x (B x C) = (C.A)B - (A.B)C 6. A.(B x C) = (A x B).C 7. B.(B x C) = (B x C)C = 0 I have no idea where to start! I have been given the hint of "Use the properties, especially 5, 6, and 7", but to me the properties seem useless because the question I'm trying to prove doesn't seem to be related to the properties. I'm getting really, really confused by the fact that I'm trying to do something with magnitude, but I'm supposed to be manipulating properties that don't involve the magnitude symbols.
Doctor Fenton answered again:
Hi Lucy, Start with ||v||^2 = v.v for any vector v. Applying that to this problem gives you a dot product of two vectors which are themselves cross-products. Property 6 will let you rewrite that, and then you need to use property 5 to further rewrite the result. You will also need to use the property of dot products that A.B = ||A|| ||B|| cos(θ) where θ is the angle between A and B.
Lucy responded (omitting some side trails):
Hi Dr. Fenton, I've looked at your suggestions and I've gotten a lot farther, but I'm still not quite there yet. So far I have: Since ||v||^2 = v.v, we can square both sides and get (||A x B||)^2 = (A x B).(A x B)
Doctor Fenton answered:
Hi Lucy, For convenience, I rewrite the properties: Properties are: 1. A x B = -B x A 2. A x (B + C) = A x B + A x C 3. A x A = 0 4. r(A x B) = r(A) x B = A x (rB) 5. A x (B x C) = (C.A)B - (A.B)C 6. A.(B x C) = (A x B).C 7. B.(B x C) = (B x C)C = 0 First, apply property 6. It's somewhat confusing to have A,B, and C represent both specific vectors (in your problem) and generic vectors (in the formulas). Let me rewrite property 6 in terms of generic vectors U, V, and W: U.(V x W) = (U x V).W . Now apply it to (A x B).(A x B), with U = A x B, V = A, and W = B: (A x B).(A x B) = ((A x B) x A).B . Next, you want to apply property 5 to simplify the triple vector product on the right side, but that requires the first cross-product to be in the second factor, so you must first apply property 1, and then you can apply property 5, to get -((A.B)A - (A.A)B).B . Now, you have a vector dotted with the difference of two vectors. The dot products A.B and A.A are just constants (scalars): it's like -(sA - tB).B . Compute that dot product, using the distributive property, before applying the dot product identity. Then, put back in the values of s and t.
Lucy did that:
After applying the distributive property, I get -((A.B)A).B - ((A.A)B).B)
Doctor Fenton continued:
This expression is equal to -(A.B)(A.B) + (A.A)(B.B) = ||A||^2 ||B||^2 - (A.B)^2 Now apply the identity A.B = ||A|| ||B|| cos(θ) .
Lucy was able to finish:
I got it!! Now I have ||A||^2 ||B||^2 - (||A|| ||B|| cos(θ))^2 ||A||^2 ||B||^2 - ||A||^2 ||B||^2 cos^2(θ) ||A||^2 ||B||^2 (1 - cos^2(θ)) ||A||^2 ||B||^2 (sin^2(θ)) ||A|| ||B|| sin(θ) Which is the end of the proof! Thank you so much for helping me, I really appreciate this wonderful favour you have done for me and the time you took to type out your thorough answers.
Putting all this together, here is the work, which parallels what we did with components before:
$$(||A \times B||)^2 = (A \times B)\cdot(A \times B) \\= ((A \times B) \times A)\cdot B \\= -((A\cdot B)A – (A\cdot A)B)\cdot B \\= -((A\cdot B)A)\cdot B – ((A\cdot A)B)\cdot B) \\= -(A\cdot B)(A\cdot B) + (A\cdot A)(B\cdot B) \\= ||A||^2 ||B||^2 – (A\cdot B)^2 \\= ||A||^2 ||B||^2 – (||A|| ||B|| cos(\theta))^2 \\= ||A||^2 ||B||^2 – ||A||^2 ||B||^2 \cos^2(\theta) \\= ||A||^2 ||B||^2 (1 – \cos^2(\theta)) \\= ||A||^2 ||B||^2 (\sin^2(\theta))$$
$$||A \times B|| = ||A|| ||B|| \sin (\theta)$$
For a very different perspective, you may want to read this, from 2001, which was the second link I gave to Avinash:
Cross Products; Rotating in Three Dimensions
Next time we’ll look at the third link, a long discussion of dot and cross products and a lot more.